

Getting your clothes to fit neatly inside a suitcase can sometimes be struggle, but robotics engineers at UC Berkeley can help you out.
They’ve come up with an efficient way to fold a variety of clothes into neat little rectangles. These techniques are intended to help a new generation of robots take on a monotonous household chore: folding laundry.
Using cameras and shape recognition software, the robot is able to assess the best way of folding each piece of clothing based on the shape of it.

The key to improving robots is in Artificial Intelligence (AI). Robots can only do what their programming tells them to do — and often can’t adapt to new or unique circumstances.
For example, you can program a robot to fold a shirt, but if you throw in a shirt with buttons on the opposite side, the robot may not be able to adapt to the new situation and fold it.
The UC Berkeley engineers are trying to develop robots that don’t rely on such specific programming.


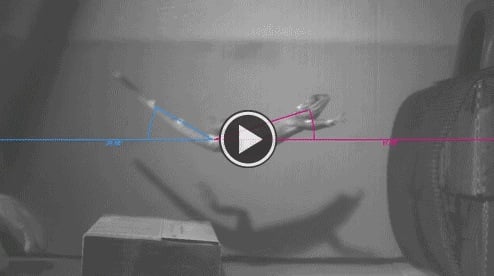
 UC Davis researchers go into rattlesnake country to study the interaction between snakes and squirrels. The snakes are real, but the squirrel is a robot.
UC Davis researchers go into rattlesnake country to study the interaction between snakes and squirrels. The snakes are real, but the squirrel is a robot.